« SE2a4 USB 2023/2024 E13 » : différence entre les versions
Aucun résumé des modifications |
Aucun résumé des modifications |
||
| (5 versions intermédiaires par le même utilisateur non affichées) | |||
| Ligne 35 : | Ligne 35 : | ||
* Résistances - Condensateur | * Résistances - Condensateur | ||
* Led (Vert - Rouge)<br> | * Led (Vert - Rouge)<br> | ||
<br> | |||
------------------------------ | |||
<br> | |||
'''''Suite Soudage PCB :''''' | |||
Lors de la séance du 23/05/2024, j'ai positionné et/ou soudé les éléments suivants : | |||
* Les dernières résistances | |||
* La dernière LED | |||
* La photo résistance | |||
* Le servomoteur <br> | |||
J'ai également réussi à faire tenir la carte sur l'écran : en utilisant une autre carte, qui était déjà percée comme il le fallait, j'ai pu les assembles dos à dos pour serrer avec l'écran entre les deux. Vous trouverez une image/vidéo dans la partie suivante. | |||
< | |||
<br> | |||
------------------------------ | |||
< | <br> | ||
'''''Clignotement LED :''''' | |||
Une fois les LED soudées, je vérifie que tout est OK avec un code qui permet de les faire clignoter :<syntaxhighlight lang="c"> | |||
#include <stdlib.h> | |||
#include <stdio.h> | |||
#include <avr/io.h> | |||
#include <util/delay.h> | |||
#define BLINK_DELAY_MS_COURT 500 | |||
#define BLINK_DELAY_MS_LONG 1000 | |||
#define pinPB4 0b00010000 | |||
#define pinPB5 0b00100000 | |||
int main(void) | |||
{ | |||
DDRB|= pinPB4; | |||
DDRB|= pinPB5; | |||
// Boucle infinie | |||
while(1) { | |||
//LED ON | |||
PORTB &= ~pinPB5; | |||
_delay_ms(BLINK_DELAY_MS_COURT); | |||
PORTB &= ~pinPB4; | |||
_delay_ms(BLINK_DELAY_MS_COURT); | |||
//LED OFF | |||
PORTB |= pinPB5; | |||
_delay_ms(BLINK_DELAY_MS_COURT); | |||
PORTB |= pinPB4; | |||
_delay_ms(BLINK_DELAY_MS_COURT); | |||
} | |||
} | |||
</syntaxhighlight> | |||
<br> | |||
<gallery mode="packed-overlay" heights="200px"> | |||
Fichier:Blink Green.jpg|vignette|Blink Green | |||
Fichier:Blink Red.jpg|vignette|Blink Red | |||
</gallery> | |||
(J'ai seulement importé des photos car mes vidéos sont trop volumineuses..) | |||
<br> | |||
------------------------------ | |||
<br> | |||
Voici un '''''AVANT/APRÉS''''' de la carte : | |||
<gallery mode="slideshow" caption="Avancée FINALE" heights=100px widths=100px> | |||
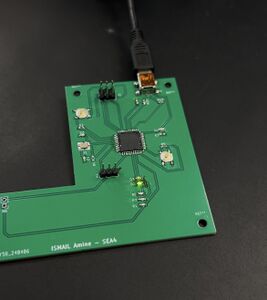
Fichier:Carte Vierge.jpg|vignette|'''''Carte Vierge''''' | |||
Fichier:Carte 1-2 Soudé.jpg|vignette|'''''1<sup>ère</sup> Soudure''''' | |||
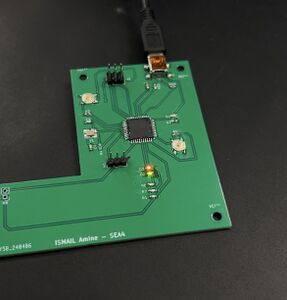
Fichier:Final Card.jpg|vignette|'''''Carte Finale''''' | |||
Fichier:System Final Card.jpg|vignette|'''''Système Carte Finale''''' | |||
</gallery> | |||
Enfin, je connecte la carte en USB et vérifie qu'elle est bien en mode DFU/USB avec la commande '''''lsusb''''' -> '''''TEST OK''''' | |||
=== Code === | === Code === | ||
| Ligne 55 : | Ligne 115 : | ||
=== Choix de la partie à coder === | === Choix de la partie à coder === | ||
Serveur UDP et thread de scan des contrôleurs d'écrans | ''Serveur UDP et thread de scan des contrôleurs d'écrans :'' | ||
cf -> Dépot GIT | Yacin MERAHI (fait à deux) | |||
''Serveur HTTP de pages statiques et des deux pages dynamiques :'' | |||
cf -> Dépot GIT (fait à deux) | |||
Version actuelle datée du 29 mai 2024 à 19:51
Étudiants
ISMAIL Amine | MERAHI Yacin - SE2A4
Accès GIT
- Lien sur le GIT du projet KiCAD (archives.plil.fr) : https://archives.plil.fr/aismail/projet_RES_ISMAIL.git
- Commande pour GIT : git add * | git commit | git push
Carte Électronique
Conception - Modélisation PCB :
Pour la conception/modélisation de la carte électronique, je passe par les étapes suivantes :
- Placer et relier tous les composants
- Associer les empreintes aux composants
- Concevoir le circuit imprimé (Taille, forme ..)
- Placer des VIAS sur le PCB
- Effectuer le routage

Schéma PCB
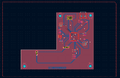
Image PCB

Dimensionnement PCB


Réception - Soudage PCB :
Pour le soudage, j'utilise un fer à souder et un pistolet à air chaud pour les plus petits composants qui sont plus compliqués à souder.
Je commence par souder les éléments suivants :
- Quartz
- ATMega
- Embases à broches
- Boutons poussoir
- Connecteur USB
- Résistances - Condensateur
- Led (Vert - Rouge)
Suite Soudage PCB :
Lors de la séance du 23/05/2024, j'ai positionné et/ou soudé les éléments suivants :
- Les dernières résistances
- La dernière LED
- La photo résistance
- Le servomoteur
J'ai également réussi à faire tenir la carte sur l'écran : en utilisant une autre carte, qui était déjà percée comme il le fallait, j'ai pu les assembles dos à dos pour serrer avec l'écran entre les deux. Vous trouverez une image/vidéo dans la partie suivante.
Clignotement LED :
Une fois les LED soudées, je vérifie que tout est OK avec un code qui permet de les faire clignoter :
#include <stdlib.h>
#include <stdio.h>
#include <avr/io.h>
#include <util/delay.h>
#define BLINK_DELAY_MS_COURT 500
#define BLINK_DELAY_MS_LONG 1000
#define pinPB4 0b00010000
#define pinPB5 0b00100000
int main(void)
{
DDRB|= pinPB4;
DDRB|= pinPB5;
// Boucle infinie
while(1) {
//LED ON
PORTB &= ~pinPB5;
_delay_ms(BLINK_DELAY_MS_COURT);
PORTB &= ~pinPB4;
_delay_ms(BLINK_DELAY_MS_COURT);
//LED OFF
PORTB |= pinPB5;
_delay_ms(BLINK_DELAY_MS_COURT);
PORTB |= pinPB4;
_delay_ms(BLINK_DELAY_MS_COURT);
}
}
Blink Green
Blink Red


(J'ai seulement importé des photos car mes vidéos sont trop volumineuses..)
Voici un AVANT/APRÉS de la carte :
- Avancée FINALE

Carte Vierge

1ère Soudure

Carte Finale

Système Carte Finale




Enfin, je connecte la carte en USB et vérifie qu'elle est bien en mode DFU/USB avec la commande lsusb -> TEST OK
Code
Choix de la partie à coder
Serveur UDP et thread de scan des contrôleurs d'écrans :
cf -> Dépot GIT | Yacin MERAHI (fait à deux)
Serveur HTTP de pages statiques et des deux pages dynamiques :
cf -> Dépot GIT (fait à deux)