« I2L 2025 Groupe3 » : différence entre les versions
| Ligne 80 : | Ligne 80 : | ||
Nous avons ensuite mis en place le '''capteur à ultrasons (sonar)''', chargé de mesurer la '''distance''' entre le capteur et un obstacle. Un programme a été développé pour calculer la distance en temps réel, en fonction du temps aller-retour du signal ultrasonique. Cette valeur était également affichée sur l’écran LCD, ce qui permettait de suivre les variations de distance en direct. | Nous avons ensuite mis en place le '''capteur à ultrasons (sonar)''', chargé de mesurer la '''distance''' entre le capteur et un obstacle. Un programme a été développé pour calculer la distance en temps réel, en fonction du temps aller-retour du signal ultrasonique. Cette valeur était également affichée sur l’écran LCD, ce qui permettait de suivre les variations de distance en direct. | ||
'''4. Intégration du servo et du sonar''' | |||
Enfin, nous avons combiné les deux dispositifs dans un '''programme commun'''. Le servo effectue un mouvement continu : | Enfin, nous avons combiné les deux dispositifs dans un '''programme commun'''. Le servo effectue un mouvement continu : | ||
Version du 16 octobre 2025 à 14:25
Proposition de système (étudiants)
Ce projet consiste à créer un détecteur d'obstacles Sonar. Le système utilisera un capteur sonar monté sur un servomoteur pour balayer la zone et mesurer les distances.
La programmation se basera sur un principe événementiel. Le microcontrôleur enverra une onde, démarrera un chronomètre, puis calculera la distance de l'obstacle en fonction du temps mis pour recevoir l'écho. Ce cycle se répétera en continu pour un balayage complet.
Les données brutes seront envoyées à un ordinateur via le port série USB pour un affichage "radar". Un écran LCD affichera en temps réel des données de base. Deux LEDs serviront d'indicateurs de l'état de fonctionnement du programme et une dernière LED sous tension.
Contre-proposition (intervenant)
Votre objet doit pouvoir être autonome et marcher sur batterie avec affichage sur l'écran LCD 2 lignes.
L'objet doit aussi pouvoir être connecté par USB à un PC et recevoir un angle de détection du PC puis envoyer la distance du premier obstacle au PC sur cet angle. Dans ce cas une représentation du type "sonar sous-marin" est affiché sur le PC. Vous utiliserez la classe USB "vendeur" (spécifique) pour votre périphérique.
Le bricolage pour installer le sonar sur le servo-moteur est à votre charge. Une solution avec un PCB d'essai vous sera proposé.
Proposition définitive (étudiants)
Répartition du travail (étudiants)
Carte
Schéma initial (étudiants)
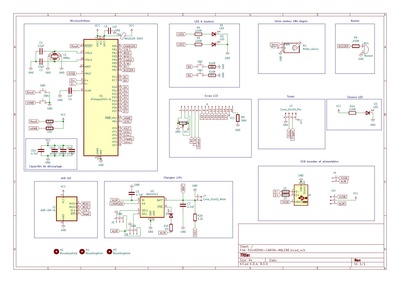
- schéma (projet KiCAD) : Fichier:I2L-2025-Carte-G3.zip
Carte routée (intervenant)
Vous utiliserez la carte avec batterie.
Composants (intervenant)
Il manque au 10 octobre 2025, un connecteur femelle 16 broches.
Carte réalisée (intervenant)

La carte est entiérement soudée à l'exception d'un connecteur 16 broches pour l'écran. Il reste aussi du travail autour de la carte d'essai portant le sonar.
A noter : un problème pour la broche de commande du servo-moteur. Cette broche est reliée à PF6 alors qu'elle devrait être connecté à une broche gérée par un minuteur pour générer un signal PWM comme PB7 ou PD0.
Au 15 octobre 2025, la carte est complétement soudée, y compris la carte d'essai pour porter le sonar. A la même date le sonar a été déplacé vers PB0 et la LED initialement sur PB0 vers PF6. Attention aux fils au recto de la carte : fragile !
Travaux (étudiants)
- 13 Octobre 2025 :
Découverte de la carte et des composants, programmation pour pouvoir allumer les LEDS avec un délai d'une seconde en appuyant sur un bouton. Importation de la bibliothèque LCD pour pouvoir utiliser l'écran, et nous avons réussi à afficher du texte sur celui-ci.
- 16 octobre 2025 :
1. Mise en route du servo-moteur
Nous avons commencé par la mise en fonctionnement du servo-moteur. L’objectif initial était de vérifier son bon comportement sur toute son amplitude de mouvement. Pour cela, nous avons réalisé plusieurs essais en faisant varier l’angle de 0° à 180°. Après plusieurs tests, nous avons remarqué que les valeurs envoyées au servo devaient être ajustées pour correspondre réellement à cette plage d’angles. Ainsi, nous avons déterminé que les valeurs de 5 à 19 représentaient une rotation complète de 0° à 180°. Ces réglages ont permis d’obtenir un mouvement fluide et précis sur toute la course du servo.
2. Affichage de l’angle sur l’écran LCD
Une fois le servo calibré, nous avons ajouté un affichage en temps réel de l’angle sur l’écran LCD. À chaque changement de position du servo, la valeur de l’angle actuel était calculée et affichée instantanément. Cela nous a permis de vérifier visuellement la cohérence entre la position physique du servo et la valeur numérique affichée.
3. Mise en route du sonar
Nous avons ensuite mis en place le capteur à ultrasons (sonar), chargé de mesurer la distance entre le capteur et un obstacle. Un programme a été développé pour calculer la distance en temps réel, en fonction du temps aller-retour du signal ultrasonique. Cette valeur était également affichée sur l’écran LCD, ce qui permettait de suivre les variations de distance en direct.
4. Intégration du servo et du sonar
Enfin, nous avons combiné les deux dispositifs dans un programme commun. Le servo effectue un mouvement continu :
- une rotation de 5 à 19,
- puis un retour de 19 à 5,
- le tout en boucle infinie.
Pendant ce mouvement, le système affiche simultanément :
- sur la première ligne de l’écran LCD : l’angle actuel du servo,
- sur la deuxième ligne : la distance mesurée par le sonar.
Cette intégration permet donc d’obtenir un balayage automatique de l’environnement, avec un retour visuel en temps réel des données d’angle et de distance.
Extraits significatifs de code (étudiants)
Rendus (étudiants)
Projet KiCAD : Fichier:I2L-2025-Carte-G3-final.zip
Programmes :
- microcontrôleur : Fichier:I2L-2025-Programmes-uC-G3.zip
- ordinateur Fichier:I2L-2025-Programmes-PC-G3.zip