« I2L 2025 Groupe4 » : différence entre les versions
| Ligne 50 : | Ligne 50 : | ||
A noter un second problème : la broche de commande du servo-moteur est reliée à PF6 alors qu'elle devrait être connecté à une broche gérée par un minuteur pour générer un signal PWM comme PB7 ou PD0. | A noter un second problème : la broche de commande du servo-moteur est reliée à PF6 alors qu'elle devrait être connecté à une broche gérée par un minuteur pour générer un signal PWM comme PB7 ou PD0. | ||
Au 15 octobre 2025, la carte est complétement soudée, y compris la carte d'essai portant les photorésistances. A la même date le | Au 15 octobre 2025, la carte est complétement soudée, y compris la carte d'essai portant les photorésistances. A la même date le servo a été déplacé vers PD0 et la LED initialement sur PB0 vers PF6. Attention aux fils au recto de la carte : fragile ! | ||
= Travaux (étudiants) = | = Travaux (étudiants) = | ||
Version du 16 octobre 2025 à 09:52
Proposition de système (étudiants)
Un système qui s'oriente automatiquement vers la source lumineuse la plus forte. Il intégrera deux capteurs de lumière ainsi qu'un moteur. Le moteur fera tourner le système vers le capteur de lumière qui en reçoit le plus. Pour cela, le moteur bougera sur un axe vertical à 180° et sera entouré de deux capteurs de lumière, celui qui reçoit le plus de lumière donnera au système (et donc au moteur) la direction à prendre. Une LED indiquera l'état actuel du système :
- allumée: le système est en train de se diriger vers la source de lumière
- éteinte: le système ne bouge pas
Egalement un bouton permettra de switcher entre un mode manuel et automatique. Le mode automatique suit le fonctionnement précédemment décrit. Tandis que le mode manuel permettra à l'ordinateur d'ordonner au moteur de se rendre à un certain angle. Une deuxième LED indiquera le mode actuel.
- allumée: mode automatique
- éteinte: mode manuel
Contre-proposition (intervenant)
Dans le mode non-autonome (commandé par le PC) les valeurs de luminosité doivent être récupérées par le PC et affichées. Votre périphérique USB utilisera la classe "vendeur" (spécifique).
Le mode autonome doit pouvoir fonctionner avec la carte alimentée par batterie.
Le bricolage pour installer les photorésistances sur le servo-moteur est à votre charge. Une petite carte électronique serait adaptée. Une solution sera proposée avec un PCB d'essai.
Proposition définitive (étudiants)
Répartition du travail (étudiants)
Carte
Schéma initial (étudiants)
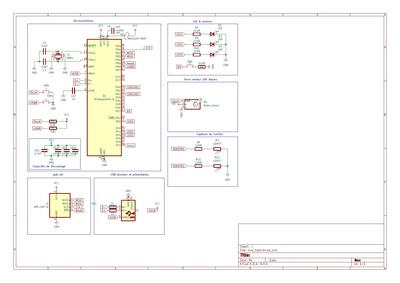
- schéma (projet KiCAD) : Fichier:I2L-2025-Carte-G4.zip
Carte routée (intervenant)
Vous utiliserez la carte avec batterie.
Composants (intervenant)
Carte réalisée (intervenant)

La carte est entiérement soudée. Cela dit il y a encore du travail pour le PCB d'essai portant les photorésistances. D'autre part les photorésistances ne sont pas encore disponibles.
A noter un problème : les photorésistances R38 et R39 ne sont pas connectées sur des broches ADC du microcontrôleur. Il faut basculer de PC6 et PC7 vers PB5 et PB6.
Au 10 octobre 2025, le problème des broches ADC est réglé par connexion entre PC6/PC7 et PB5/PB6.
A noter un second problème : la broche de commande du servo-moteur est reliée à PF6 alors qu'elle devrait être connecté à une broche gérée par un minuteur pour générer un signal PWM comme PB7 ou PD0.
Au 15 octobre 2025, la carte est complétement soudée, y compris la carte d'essai portant les photorésistances. A la même date le servo a été déplacé vers PD0 et la LED initialement sur PB0 vers PF6. Attention aux fils au recto de la carte : fragile !
Travaux (étudiants)
Extraits significatifs de code (étudiants)
Rendus (étudiants)
Projet KiCAD : Fichier:I2L-2025-Carte-G4-final.zip
Programmes :
- microcontrôleur : Fichier:I2L-2025-Programmes-uC-G4.zip
- ordinateur Fichier:I2L-2025-Programmes-PC-G4.zip