I2L 2025 Groupe3
Aller à la navigation
Aller à la recherche
Proposition de système (étudiants)
Projet : Sonar USB à balayage
Ce projet consiste à créer un détecteur d'obstacles Sonar. Le système utilisera un capteur sonar monté sur un servomoteur pour balayer la zone et mesurer les distances.
La programmation se basera sur un principe événementiel. Le microcontrôleur enverra une onde, démarrera un chronomètre, puis calculera la distance de l'obstacle en fonction du temps mis pour recevoir l'écho. Ce cycle se répétera en continu pour un balayage complet.
Les données brutes seront envoyées à un ordinateur via le port série USB pour un affichage "radar". Un écran LCD affichera en temps réel des données de base. Deux LEDs serviront d'indicateurs de l'état de fonctionnement du programme.
Contre-proposition (intervenant)
Proposition définitive (étudiants)
Répartition du travail (étudiants)
Carte
Schéma initial (étudiants)
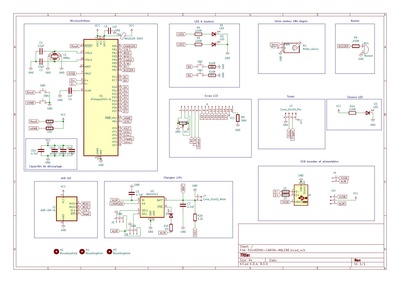
- schéma (projet KiCAD) : Fichier:I2L-2025-Carte-G3.zip
Carte routée (intervenant)
Composants (intervenant)
Carte réalisée (intervenant)
Travaux (étudiants)
Extraits significatifs de code (étudiants)
Rendus (étudiants)
Projet KiCAD : Fichier:I2L-2025-Carte-G3-final.zip
Programmes :
- microcontrôleur : Fichier:I2L-2025-Programmes-uC-G3.zip
- ordinateur Fichier:I2L-2025-Programmes-PC-G3.zip