I2L 2024 Groupe3
Aller à la navigation
Aller à la recherche
Proposition de système
Création d'un sonar 180 degrés qui écrit des données rudimentaires sur un écran LCD et qui, lorsqu'on connecte le microcontrôleur au PC, envoi en temps réel les données au PC et génère un affichage style sonar.
On a 2 programmes :
- 1 programme qui tourne dans le microcontrôleur, il est autonome, fait tourner a l'aide d'un servo-moteur le sonar (capteur style sonar) et affiche des informationss rudimentaires sur les obstacles repérés (e.g. l'obstacle le plus proche) ;
- 1 programme qui tourne sur le PC connecté au microcontrôleur. Il récupère les données en temps réel envoyées par le microcontrôleur et affiche graphiquement le résultat ;
- 2 LED de couleur (vert et rouge), la LED verte clignote toute les 5ms quand le système embarqué est autonome et la LED rouge double clignote quand un obstacle est détecté. .
A prévoir un bouton "autonomous_system" sur le microcontroleur, qui, lorsque celui-ci est branché au PC, n'envoie pas les données au PC.
Contre-proposition
ReX : pas de schéma sur le Wiki. Projet KiCAD avec le schéma téléchargé dans le mauvais lien, déplacé.
Proposition définitive
Répartition du travail
Carte
Schéma initial :
- schéma n°1 : Fichier:I2L-2024-Carte-G3a.zip
Carte routée :
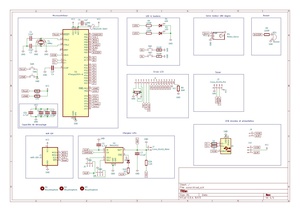

Composants :
- ATmega32u4 : disponible
- quartz GND24 : disponible
- buzzer : disponible
- perle ferrite MH2029-300Y : non disponible
- chargeur MAX1811 : disponible
- potentiomètre : disponible
- connecteur femelle 16 contacts : non disponible
- boutons : disponibles
- sonar HC-SR4 : disponible
- servo-moteur 270° : disponible
A noter que les étudiants doivent penser à un système pour assembler le servo et le sonar.
Montage
Code
Démonstrations
Rendus
Projet KiCAD : Fichier:I2L-2024-Carte-G3.zip
Programmes : Fichier:I2L-2024-Programmes-G3.zip